Mikihisa Yuasa
I am a PhD student focusing on explainable AI (XAI) & reinforcement learning policies for robot systems, advised by Professor Huy T. Tran at the Lab for Intelligent Robots and Agents (LIRA), Department of Aerospace Engineering at the University of Illinois Urbana-Champaign.

Research
My research interests are:
Explainable Reinforcement Learning Paradigms for Robotics
Neuro-symbolic and formal methods for interpretable, verifiable RL algorithms in robotics, including multi-agent RL (MARL) and hierarchical RL (HRL).Language-Conditioned Policy Generation and Zero-Shot Generalization
Scalable models to generate RL policies from language for zero-shot generalization.AI/ML Systems for Human-Robot Collaboration and Real-World Deployment
RL for teamwork and MLOps pipelines for real-world autonomous systems.
I'm always happy to collaborate! Please message me via email/LinkedIn if you are interested. I'm looking for part-time/full-time internship opportunities. Feel free to reach out if you're interested in my research.
Selected Publications & Preprints
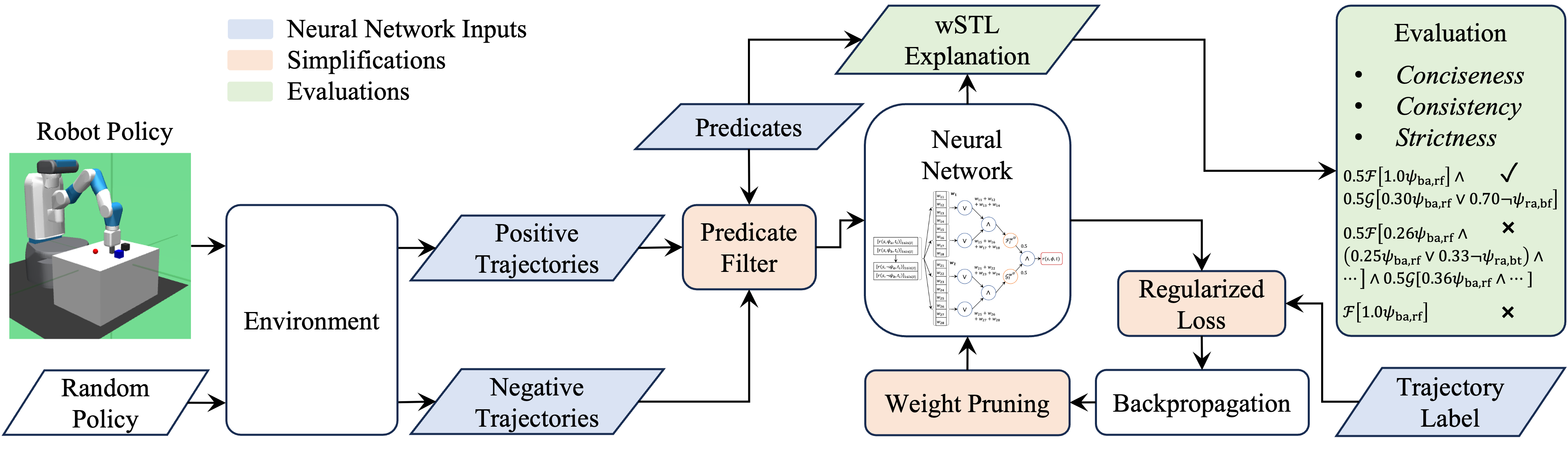
Neuro-Symbolic Generation of Explanations for Robot Policies with Weighted Signal Temporal Logic
Mikihisa Yuasa, Ramavarapu S. Sreenivas, Huy T. Tran
The 2025 American Control Conference (ACC) (2025)
We present a neuro-symbolic framework that explains robot policies using weighted temporal logic, generating concise, consistent, and strict explanations. Our method improves human-interpretability by simplifying the generated logic expressions and introducing new evaluation metrics, outperforming baselines in simulated robotic tasks.

On Generating Explanations for Reinforcement Learning Policies: An Empirical Study
Mikihisa Yuasa, Huy T. Tran, Ramavarapu S. Sreenivas
IEEE Control Systems Letters, The 2025 American Control Conference (ACC) (2024)
We propose an algorithm that explains reinforcement learning policies using linear temporal logic by comparing their action distributions with those of explanation-driven policies. This approach offers clearer insights and avoids vague explanations, as shown in three simulated tasks.

Simulations of flow over a bio-inspired undulated cylinder with dynamically morphing topography
Mikihisa Yuasa, Kathleen Lyons, Jennifer A. Franck
Journal of Fluids and Structures (2022)
We developed a morphing algorithm to explore seal whisker-inspired geometries without manual remeshing. By varying surface parameters in CFD simulations, we uncovered new force trends, enabling efficient design of vibration- and force-reducing devices.
Docs
I also maintain documentation for some of my open-source projects:
gym-tl-tools: Temporal logic wrappers for Gymnasium environments
ruspot: A Rust-based implementation of the Spot library for Python. Efficient tools for model checking, LTL translation, and automata operations.